Luis Armando Pérez Rey

Eindhoven University of Technology
Prosus
EDL P16-25 P2: Deep Learning for 3D Reconstruction, Matching & Recognition (RMR)
Research assignment: Object matching from semantic features |
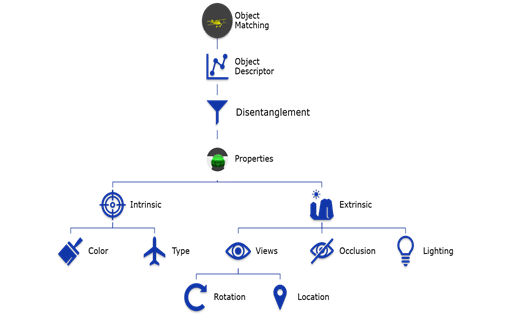
Consider the situation where, given a certain object of interest, the goal is to find all the similar items within a database of objects. For example, when trying to verify whether there is copyright infringement of a 3D model or when trying to identify duplicate objects listed in an online marketplace. The task of finding the most similar object within a database is denominated as object matching. The aim of my PhD research is to provide data efficient and interpretable methods for object matching and applying them to real world settings. My research direction focuses in object matching based on images to produce low dimensional representations which disentangle the properties of the objects to be matched. The idea is that the object’s low dimensional representations can be obtained with few labels and those representations should separate the properties of the object allowing interpretable matching. We will consider that the images from the objects contain not only information about the intrinsic properties of the object to be matched e.g. color, type, shape, etc. But also about the extrinsic properties that guide the data generation such as the lighting conditions, the occlusions due to other objects, the perspective of the camera, etc. Based on these assumptions some of the research directions explored are: – Disentanglement of geometric properties: Capture the geometrical extrinsic properties of the data by creating low dimensional representations in Riemannian submanifolds. – Object matching based on generative models: Create low dimensional representations in terms of probability distributions to perform object matching of 3D scenes. – Orientation estimation of objects: Estimation of the relative orientation of the objects with respect to the observer that generated the picture. – Uncertainty in intrinsic property estimation: Evaluation of the uncertainty of a model conditioned on the extrinsic properties shown in the data. Future directions include: – Disentanglement and estimation of hierarchical attributes of objects – Matching of objects from disentangled representations – Interpretability of matching based on disentangled representations |
Publications |
| A comparison of Methods for 3D Scene Shape Retrieval. J. Yuan et al. Proceedings of the British Machine Vision Conference. Open access-green. A metric for Linear Symmetry-Based Disentanglement. L.A. Perez Rey, L. Tonnaer, V. Menkovski, M. Holenderski, J.W. Portegies. Poster at the NeurIPS 2020 workshop on Differential Geometry meets Deep Learning. Open access-green. https://drive.google.com/open?id=1WDlsbiI5-LvRuEodb7oCxo0azipW4d4i Diffusion Variational Autoencoders. L. A. Perez Rey, V. Menkovski, J. W. Portegies. 29th International Joint Conference on Artificial Intelligence. Conference proceedings. http://L. A. Perez Rey, V. Menkovski, J. W. Portegies Can VAEs capture topological properties? L. A. Perez Rey, V. Menkovski, J. W. Portegies. Poster at NeurIPS 2019 Workshop on Bayesian Deep Learning. Open access-green. https://drive.google.com/open?id=1yeANHSHC7zUpJ8SXrZe5pllVwwuUoRGc |
Personal information: |
Organizational |
| Research Gate |